Intraoperative Navigation und Lokalisierung der multimodalen Sensoren
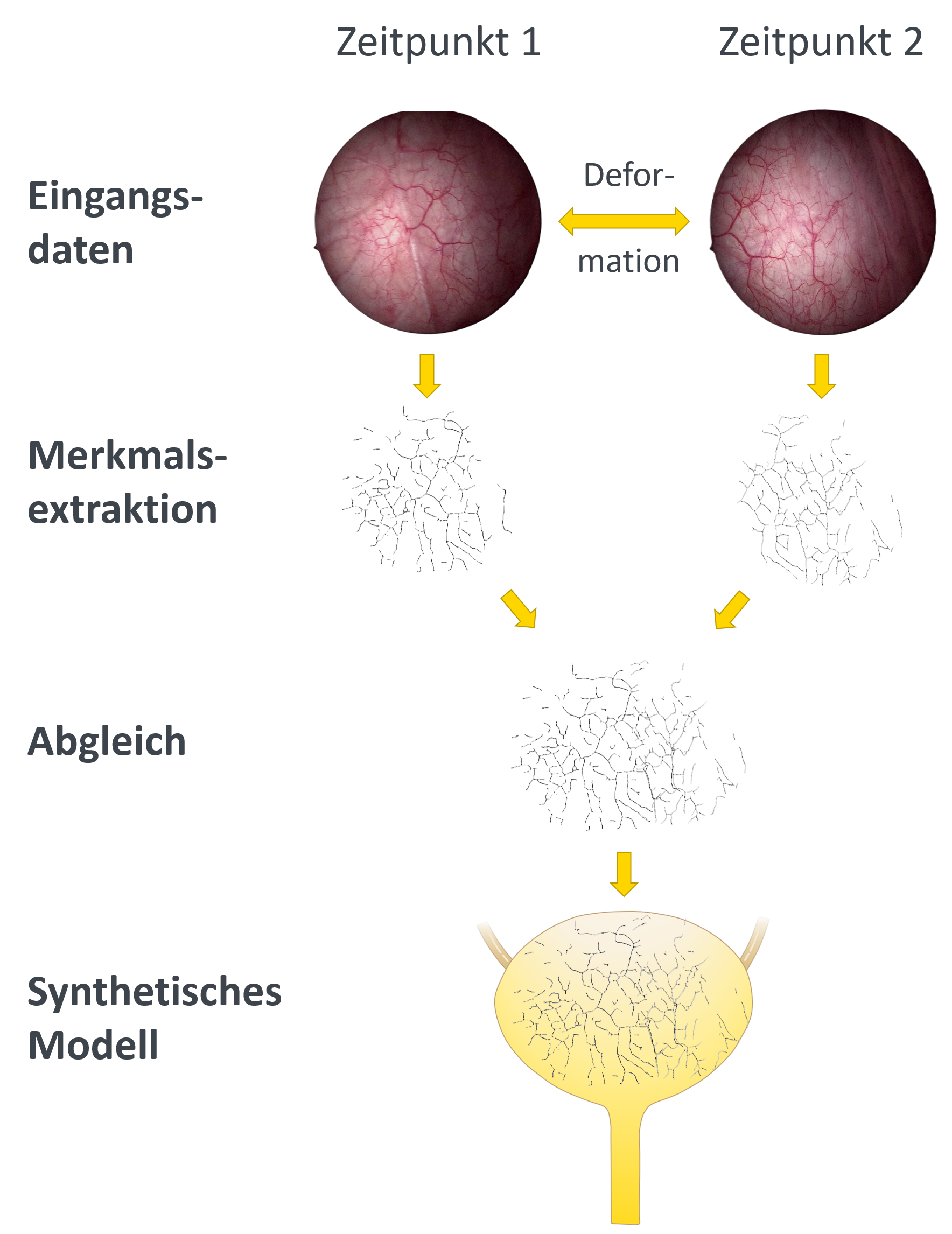
Die Navigation und Orientierung während eines chirurgischen Eingriffs sind entscheidend für die Verortung von Sensordaten und die automatisierte Dokumentation entnommener Gewebeproben. Hierfür wird ein synthetischen Blasenmodell basierend auf intraoperativen Kamerabildern entwickelt, um einen patientenspezifischen Rahmen zu schaffen, der alle während des Eingriffs gesammelten Daten zusammenführt.
Wissenschaftliche Fragestellung
Die vernetzten Blutgefäßstrukturen in der Blase bieten zuverlässige Orientierungsinformationen, die auch bei variierenden Füllständen oder Formveränderungen der Blase eine genaue Abbildung ermöglichen. Diese sollen extrahiert und zur Mustererkennung und Orientierung verwendet werden. Besonderes Augenmerk liegt auf der Robustheit und Echtzeitfähigkeit der Algorithmen, um Strukturen konsistent über verschiedene Eingriffe hinweg zu erkennen. Eine patientenindividuelle, geometrische Repräsentation des Organs wird entwickelt, die bereits deformationsbedingte Effekte abbildet und als Grundlage für die umfassende multiphysikalische Gewebemodellierung und Sensorfusion in Projekt B3 dient.
Methodik und Lösungsansätze
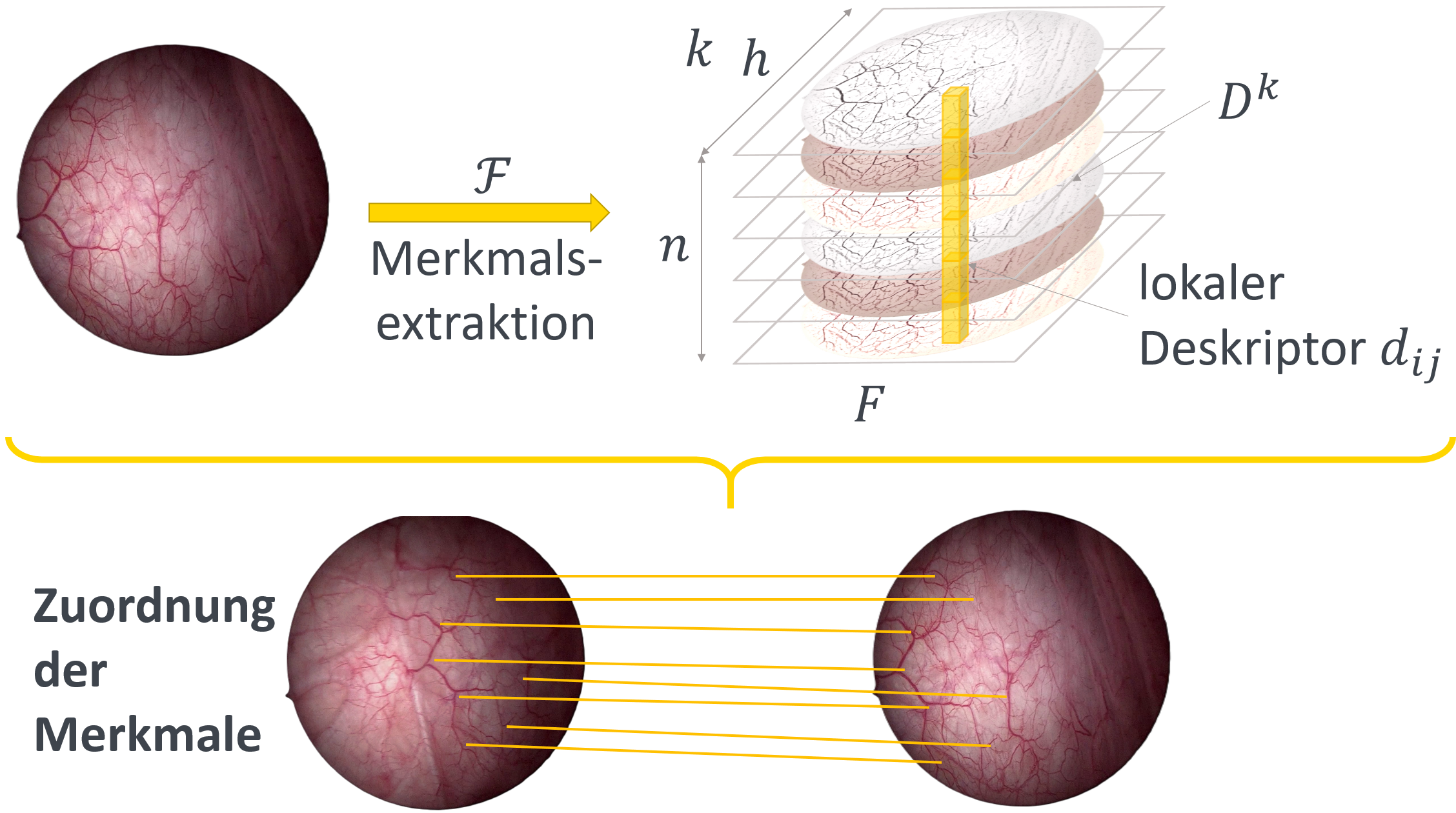
Um den Anforderungen der intraoperativen Umgebung gerecht zu werden, müssen robuste Landmarkeninformationen und angepasste Mapping-Algorithmen entwickelt werden. Für jeden Graphenknoten sollen zusätzlich zu den strukturbeschreibenden Informationen des Graphen punktspezifische Merkmalsräume bestimmt werden. Die herkömmliche Methoden, die auf den Merkmalen der benachbarten Pixel basieren, sind aufgrund von intraoperativen Herausforderungen wie variierenden Helligkeitswerten, Reflexionen und Deformationen unzureichend. Daher sind weitere Informationen zur Bildbetrachtung erforderlich, um den Merkmalsraum besser zu beschreiben.
Aufbauend auf der bewährten Merkmals-Beschreibung der Landmark-Knoten ist es schließlich die Aufgabe, zusammengehörende Strukturen zu detektieren. Zusätzlich zu den wiedergefundenen Merkmalen muss bestimmt werden, welche Strukturen in der aktuellen Beobachtung erkannt wurden, die auch in der globalen Repräsentation erfasst sind, und welche Strukturen in der globalen Struktur erfasst sind, aber in der aktuellen Beobachtung nicht mehr auftreten.
Projektverantwortliche

Franziska Krauß
M.Sc.Doktorandin B1

Carina Veil
Dr.-Ing.Betreuung A5, B1, B3

Oliver Sawodny
Prof. Dr.-Ing. habil. Dr. h.c.Sprecher des GRK 2543